Thanks to the Apollo missions and countless robot researchers, our understanding of the physical conditions, the composition and the geological history of the moon has been considerable. For example, the analysis of moon rocks, regolith and seismic measurements of the interior structure of the moon led to the theory that the earth and the moon formed about 4.5 billion years ago. Since the turn of the century, the missions have also shown that there is water on the moon, most of which consist of ice in permanently shaded regions (PSRS) around the poles.
In order to learn more about the moon and to ensure long -term habitability, missions are required that can explore the surface. This is the recommendation that a team of researchers created in a recently carried out study in which the possibility is examined to use a robot – a numerous moon research with autonomous underground robots) – to perform these tasks. These missions could be able to research one of the most promising environments for future moon bases and habitats and at the same time reveal more about the formation, development and properties of the moon.
The research was carried out by Adrian Stoica, Jared Long-Fox and Brian Wilcox. While Stoica and Wilcox are researchers with Lunasol Space LLC and California-based organic fuel company Marine Bioenergy Inc. (biography), Long-Fox is a planetary research scientist for the Center for Lunar & Asteroid Surface Studies (Class) at the University of Central Florida (UCF) and ASA Space Technology Research opportunities (NASA Space Technology Research Possibilities (NASA Space Technology).
Lava tubes and recesses on the moon have become an important focus in recent years. Based on the data received by several Orbiters, Lander and Rover, scientists have learned that these characteristics – hopefully to the earth – are significantly larger on the moon. On earth, lava watches cross the diameter of 30 meters not over 30 meters. Due to the lower gravity of the moon, scientists estimated that these characteristics could measure 385 m (1,260 ft) or more in diameter.
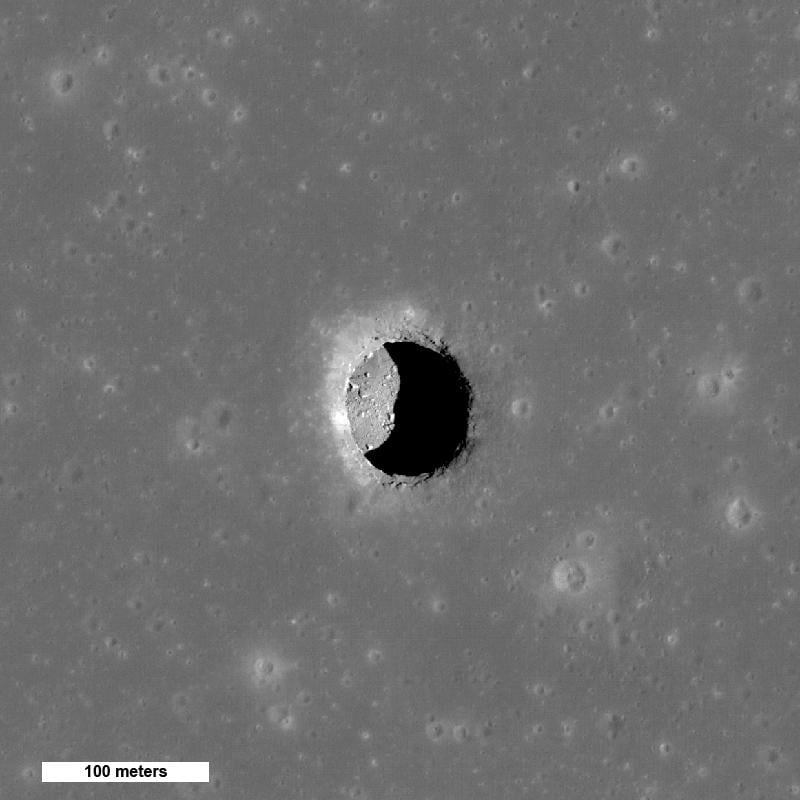
Like lava tubes on Earth, some moon tubes are accessible thanks to collapsed sections, which are referred to as the “skylight”. As part of their long -term visions for the exploration and development of moon farms, NASA and other space agencies (especially China) consider to establish habitats in these tubes in order to use the protection they offer. This includes warmer temperatures (~ 20 ° C, 70 ° F) and natural shielding in front of extreme temperature fluctuations, the vacuum of the room and the micrometeoroids.
In order to achieve this and to learn more about the properties of the moon, the composition and geological history of the moon, NASA and other space agencies need special missions to explore these characteristics. As Long-Fox was announced by email today, your concept for an underground robot would enable all of this by being able to interact both directly with the surface and the underground regolith:
“Just like on Earth, the different layers (stratigraphy) tell the history of the area in which they are. There is no wind or flowing water on the moon, so that the main processes that shape the surface are.
As part of his study, the team examined several methods to worth the robots, design considerations and potential applications and advantages of this mission. The result was her Pleaser concept, which requires a usable/retractable regolite probe within a snake-like robot. The snake configuration would enable the surrounding moon regolites to penetrate to measure their strength, thermal conductivity and dielectric properties. It could also dig into the surface or to bring yourself into the skylights and search for further examinations under the structures. Explained so long -foxically:
“This robot would inform the physical state of the regolith not only about geological history, but also about the presence of volatile such as water ice or the suitability of the area, which is examined for infrastructure development such as habitats, streets, start/landing pads. To score the regolith and the resistance to the serpentine movement of the robot Appreciate underground regoliths.
With regard to the power supply, the team took several options into account, including external electricity, a cable connected to a power source, a radioisotopic thermoelectric generator (RTG). and solar collectors. A design that they looked at showed solar modules that are embedded along the snake -like body (see picture above) that could be used and withdrawn. As Stoica stated:
“Solar collectors that are folded within the body and are used outside the body when the robot comes to the surface to bathe in the sun to get energy. We usually viewed a fusiform body snake/worm shape. Others have carried out studies with sand snake movements.
The team hopes that their study will contribute to creating concepts for a mobile platform that can examine the moon surface and the surface directly, regardless of whether it is the moon day and night. Robots of this kind can also search for underground areas that are better suited for the development of a moon base, a street or other infrastructure elements. As already mentioned, the scientific yields are also promising, since underground robots would create unprecedented opportunities to research the geology of the moon.
This robot could not only examine in situ Lunar -Regolith and rocks, but also use sensors such as seismometers. These would not only reveal the interior structure of the moon, but it is also notoriously difficult to use on the surface. After all, as Stoica added, these robots may one day be able to create underground tunnels that could accommodate the habitats of Moon Houses:
“[A]In the early stages, as soon as routes/tunnels (for fun you only call “artificial/fake lava tubes”), other devices would be more like surface robots. In this regard, they may be like the machines that build underground tunnels (drilling, ditch), but perhaps more in the formation of teams/raving than in a large machine. This is pure speculation at this point, no compromises were made and how many and how big they are indefinite. Although I have seen myself in my life, I am very careful when it comes to throwing words like swarms, etc.
Further reading: USA